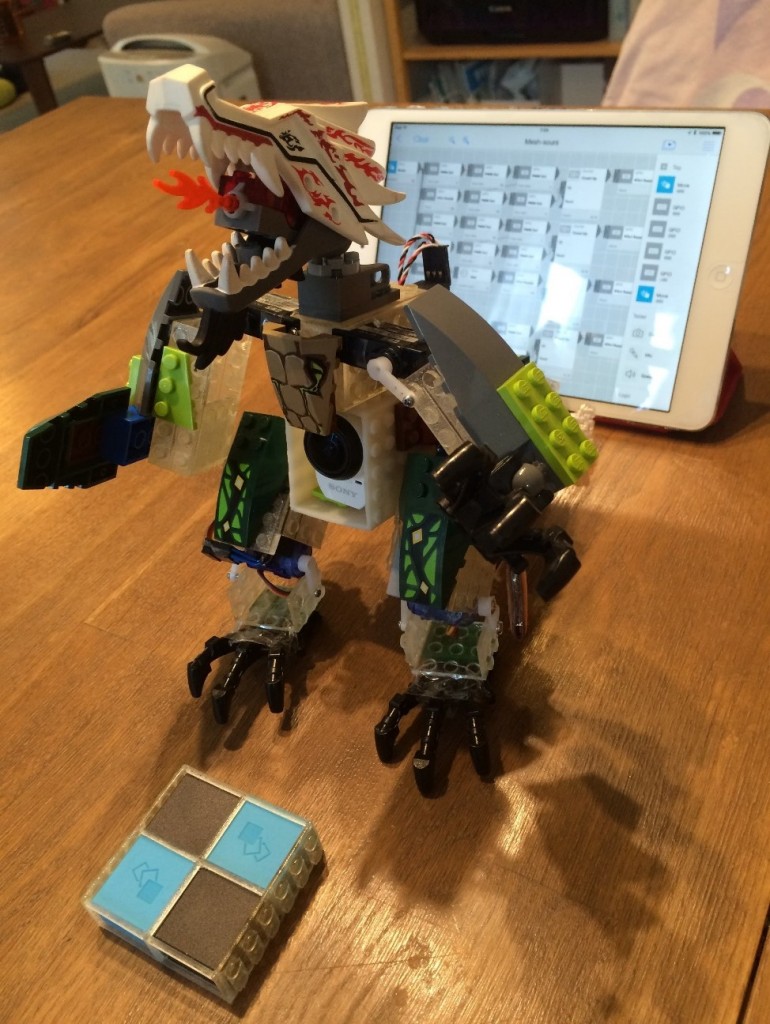
メッシュザウルス GPIO、MOVEタグなどをフル活用した二足歩行ロボット


Lチカ、DCモーター、サーボモーター、Sony Camera操作、インターネット連携などをフルに使って、歩く恐竜を作ります。
メッシュザウルスが、姫路城を襲います。

子供がレゴを組み合わせて恐竜などを作っているのですが、それが動いたら面白いね、リモコンとかカメラもつけちゃおう、と盛り上がって作りました。
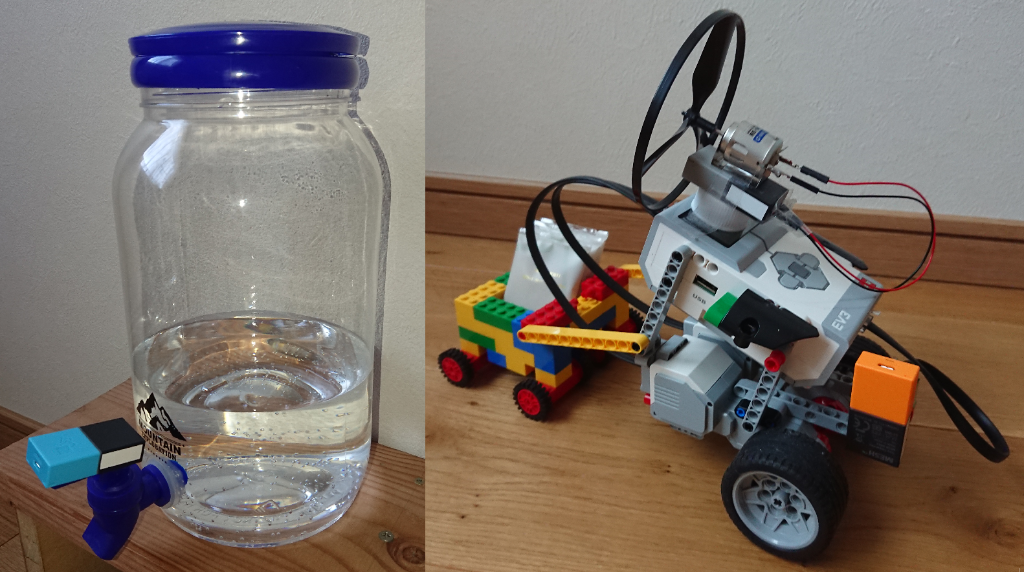
・サーボモーター2個×2脚(脚部分)
・サーボモーター2個(腕部分)
・DCモーター1個(しっぽ部分)
・レゴ・アタッチメント(3Dプリンタで自作)
・レゴ・ブロック(作りたい形に合わせて)
・LED、ケーブル
・Sony ActionCam (必要に応じて)
材料一覧です。

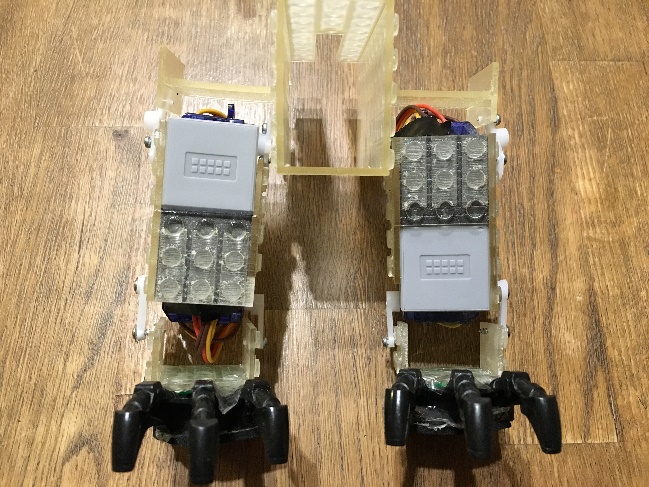
まず、片足につき1つのGPIOタグと、2つのサーボモーターが入るアタッチメントを使います。

脚の付け根部分と、足首部分が稼働するようになります。
おなか部分にはSony ActionCamが入るアタッチメントを使っています。
家にある好きなLEGOを合わせると恐竜っぽい雰囲気が出てきます。
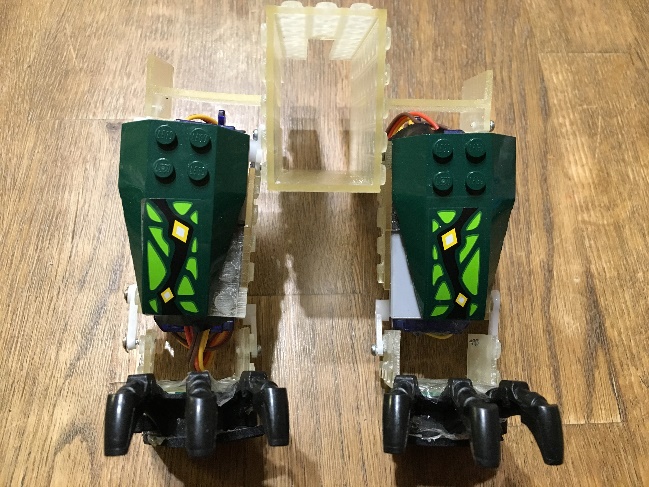
またしっぽ部分にDCモーターを使って、安定、前進方向の補助をしています。
こんな感じです。
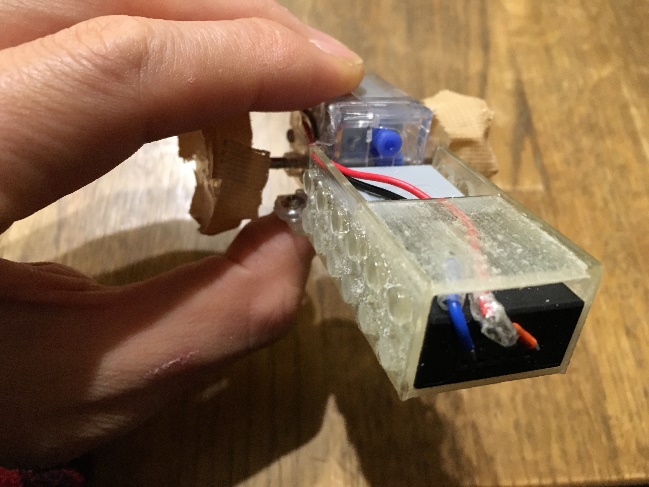
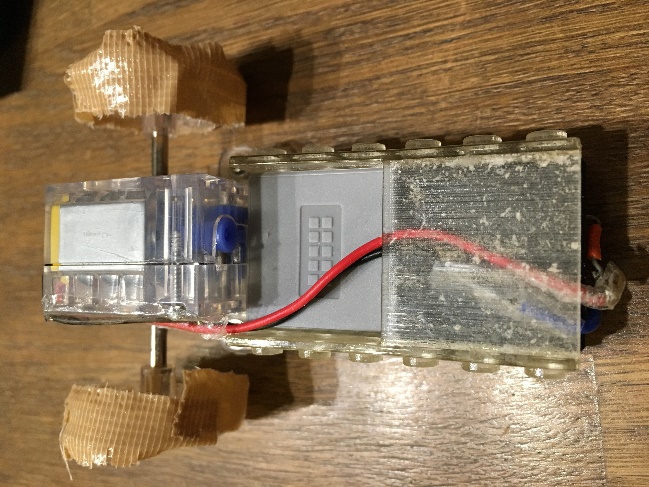
腕は先ほどのサーボモーターを二つ使って、左右に動くようになっています。もし別々に駆動させたい場合は、GPIOタグも二つ用意します。

口の部分にはLEDが入るようにして、腕を動かすGPIOタグから電源を取得します。

それをそれぞれ組み合わせて、立たせて完成です。

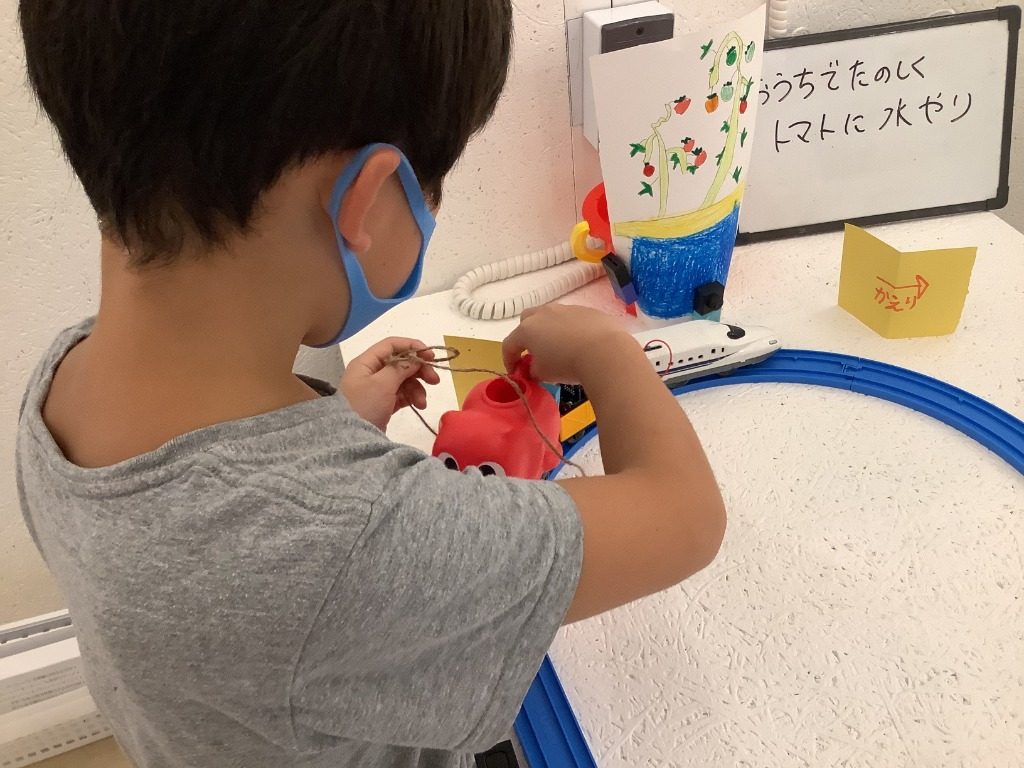
IFTTTのメール連携、Twitter連携を使うと、帰ってくる前に一吠えして、お父さんのお帰りを知らせる事もできます。
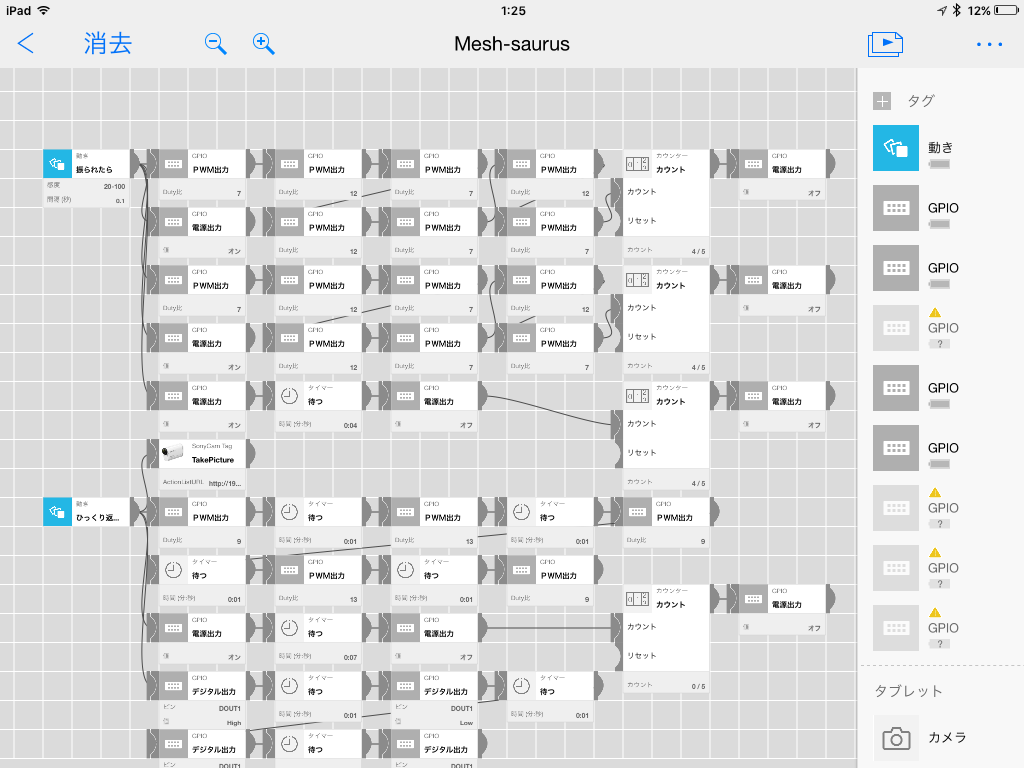
MOVEタグを振ると両脚を動かして歩きます。
MOVEタグをひっくり返すと腕を振り、口の炎が光って吠えます。
MOVEタグを強めにたたくとおなかのアクションカムで写真をとります。アクションカムをスマホ、又は専用コントロール時計につないでおくと、カメラの画像を見ながら、メッシュザウルスを操作できるようになります。